
俹俴俠乮僔乕働儞僒乕乯忣曬嬊
嵟廔峏怴擔2000擭8寧10擔
Last update 8,10,2000

俹俴俠乮僔乕働儞僒乕乯忣曬嬊
嵟廔峏怴擔2000擭8寧10擔
Last update 8,10,2000
奣棯丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂崁栚偵僕儍儞僾丂丂丂丂丂丂丂丂丂儂乕儉偵僕儍儞僾
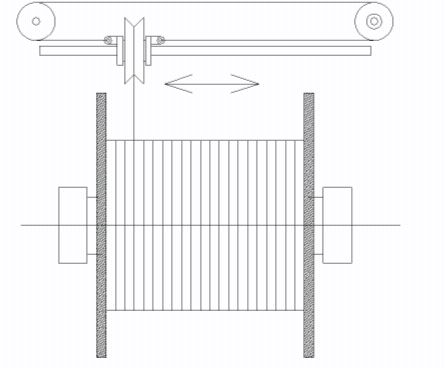
侾俋俉俆擭係寧乣 偵 俹倁俠旐暈揹慄 偺
姫庢婡乮僐僀儔乕乯
梡偵惢嶌偟偨傕偺傪丄娙慺壔偟傢偐傝傗偡偔夝愢偟傑偡丅
摉帪偼埨愳揹婡惢僾儕儞僩儌乕僞乕偵偰僩儔僶乕僗偺墲暅塣摦傪峴偭偰偄傑偟偨丅
丂丂丂伀僈僀僪丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂伀儌乕僞乕懁乮儌乕僞乕傪惓揮乛媡揮偡傞偙偲偱墲暅乯
 丂
丂
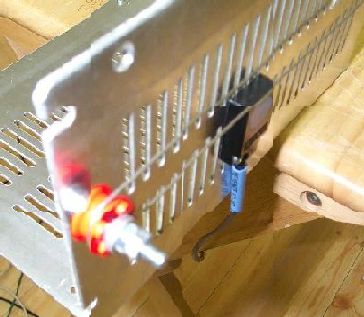
伀壓婰幨恀偼丄昡壙梡偵惢嶌偟偨僩儔僶乕僗憰抲偱偡丅乮婎杮峔憿偼忋婰恾偲摨偠偱偡丅乯
 |
 |
儌乕僞乕偼僀儞僶乕僞乕儌乕僞乕傪巊偄丄僀儞僶乕僞乕偵偰嬱摦偝傟傑偡丅
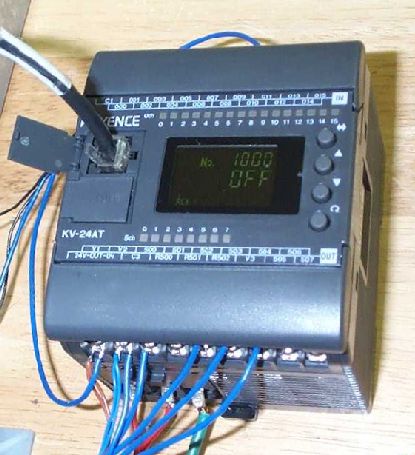
俹俴俠偵偼丄僉乕僄儞僗偺
俲倁亅俀係俙俿乮伀乯
傪巊偄丄僀儞僶乕僞乕偵偼丄埨愳揹婡偺
俇侾俇俧俆乮伀乯 傪梡偄傑偟偨丅
 |
 |
亜僉乕僄儞僗偺俲倁僔儕乕僘偼彫宆偱崅婡擻側僷僢働乕僕僞僀僾偱丄柦椷岅傕朙晉偱偡丅
丂崱夞偺僩儔僶乕僗惂屼偵偼廫暘側婡擻傪旛偊偰偄傑偡丅
丂俹俴俠傊僾儘僌儔儉傪揮憲偡傞偵偼愱梡働乕僽儖傪忋婰幨恀偺傛偆偵嵎偟崬傫偱峴偄傑偡丅
丂傑偨傾僋僙僗僂僀儞僪僂偲偄偆塼徎昞帵夋柺偲係偮偺儃僞儞偑偁傝丄
丂撪晹愙揰偺俷俶乛俷俥俥丄僨乕僞儊儌儕偺曄峏側偳偑壜擻偱偡丅
亜埨愳揹婡偺俧俆僔儕乕僘偼丄俹俧側偟儀僋僩儖惂屼偑巊偊傞僀儞僶乕僞乕偱丄
丂侾丗侾侽侽偺惛搙傪桳偟偰偄傑偡丅奜晹偵俹俧傪旛偊傞帠偱侾丗侾侽侽侽偺惛搙傑偱崅傔傞偙偲偑偱偒傑偡丅
崁栚
乮僾儘僌儔儉俶倧丏偼戝偒偔側傞傎偳擄偟偔側傝傑偡乯
僾儘僌儔儉侾(淖兽敖01)丂塣揮乛掆巭愙揰偵傛傞塣揮丅墲暅塣摦偺傒偺娙堈斉丅亙帺屓曐帩丄弖帪愙揰丄婎杮柦椷偵傛傞僆儖僞僱僀僩側偳亜
僾儘僌儔儉俀(淖兽敖02)丂淖兽敖01偺俽倕們倲倝倧値侽侽俆傪墳梡柦椷偱娙慺壔丅亙帺屓曐帩丄弖帪愙揰丄墳梡柦椷偵傛傞僆儖僞僱僀僩側偳亜
僾儘僌儔儉俁(淖兽敖03)丂塣揮掆巭帪偵掕埵抲偱掆巭丅乮旕嬱摦懁掆巭乯丂亙帺屓曐帩傪奜晹忦審偱愗傞丄弖帪愙揰丄僆儖僞僱僀僩側偳亜
僾儘僌儔儉係(淖兽敖04)丂塣揮掆巭帪偵掕埵抲偱掆巭丅乮嬱摦懁掆巭乯丂亙帺屓曐帩傪奜晹忦審偱愗傞丄弖帪愙揰丄僆儖僞僱僀僩側偳亜
僾儘僌儔儉俆(淖兽敖05)丂尨揰暅婣婡擻晅偒丅草兽袄氨装褌艐賸}掆巭丅丂亙草兽袄皞虉購韾趽_弌椡丄弖帪愙揰丄尨揰暅婣側偳亜
僾儘僌儔儉俇(淖兽敖06)丂淖兽敖02偵腊輲瀭虌}懍嬱摦傪捛壛丅乮僣僲杊巭婡擻丅乯丂亙草兽袄皞虘綊i懍巜椷丄帺屓曐帩丄僞僀儅乕側偳亜
愭摢偵栠傞丂丂丂丂丂丂丂儂乕儉偵僕儍儞僾
 |
 |
仾嬤愙僗僀僢僠偵偼丄僉乕僄儞僗
俤倅亅侾俉俿 傪巊梡丅
伀夞楬恾柺
仾恾柺偺愢柧
丂俲倅亅俀係俙俿偺俹俀係乮俀係倁乯偲俶俀係乮侽倁乯偼丄俹俴俠擖椡晹偲嬤愙僗僀僢僠偺揹尮偲偟偰巊梡偟偰偄傑偡丅
丂嬤愙僗僀僢僠偼屄恖揑側岲傒偱俁慄幃傪巊梡偟偰偄傑偡偑丄俀慄幃偱傕栤戣偁傝傑偣傫丅
丂俧俆僀儞僶乕僞乕偺 (FWD)侾傪俷俶偵偡傞偲儌乕僞乕偼惓揮偟丄(REV)俀傪俷俶偵偡傞偲儌乕僞乕偼媡揮偟傑偡丅
丂偨偩偟丄椉曽偑俷俶偟偨応崌偼丄埨慡偺偨傔掆巭偡傞傛偆偵嶌傜傟偰偄傑偡丅
丂(COM)侾侾偼丄嫟捠僐儌儞抂巕偱偡丅
丂懍搙乮廃攇悢乯愝掕偼丄僨僕僞儖僆儁儗乕僞乕乮僀儞僶乕僞乕昞柺偵憰旛偝傟偰偄傞憖嶌愝掕僷僱儖乯偱愝掕偟傑偡丅
丂僀儞僶乕僞乕偺愝掕抣偼丄僾儘僌儔儉偺愢柧棑偵婰嵹偟偰偄傑偡丅
伀僾儘僌儔儉
伀僾儘僌儔儉偺愢柧
捛婰
俽倕們倲倝倧値侽侽偼丄俹俴俠偵揹尮偑擖偭偨帪偺侾夞偩偗幚峴偝傟傞弶婜愝掕梡偱偡丅
嵟弶偺僩儔僶乕僗偺堏摦曽岦傪巜掕偟偰偄傑偡丅
侾侽侽侽傪俷俶仺俷俥俥偵偰塣揮傪奐巒偟丄侾侽侽侾傪俷俶仺俷俥俥偡傞偲掆巭偟傑偡丅乮帺屓曐帩夞楬乯
侾侽侽侽偲侾侽侽侾偼撪晹愙揰側偺偱丄俹俴俠偺傾僋僙僗僂僀儞僪僂偐傜俷俶乛俷俥俥偝偣傞偐丄
儔僟乕僒億乕僩僜僼僩偺嫮惂俷俶乛俷俥俥婡擻傪巊偆偙偲偵側傝傑偡丅
侾侽侽侽傪侽侽侽侽偵丄侾侽侽侾傪侽侽侽侾偵彂偒姺偊丄
俹俴俠偺侽侽侽侽抂巕偲侽侽侽侾抂巕偵墴偟儃僞儞僗僀僢僠傪晅偗傟偽丄
儃僞儞憖嶌偵曄峏偱偒傑偡丅
僩儔僶乕僗偼俀偮偺嬤愙僗僀僢僠偺娫傪墲暅偡傟偽傛偄偺偱丄
偄偢傟偐偺嬤愙偑俷俶偡傞搙偵丄儌乕僞乕偺夞揮曽岦傪媡偵偡傟偽丄
偄偮偱傕俀偮偺嬤愙偺娫偵偄傞偙偲偵側傝傑偡丅
偦偙偱夞揮曽岦傪帵偡僼儔僌傪梡堄偟丄偙傟傪僆儖僞僱僀僩偡傟偽丄
偙偺婡擻偼幚尰偱偒傑偡丅
仛崱夞偺僾儘僌儔儉偼俽倕們倲倝倧値俆偵偰僆儖僞僱僀僩張棟傪峴偭偰偄傑偡丅
俁侽侽俀偲俁侽侽俁偼嬤愙偑俷俶偟偨帪偺弖帪愙揰偱丄
俁侽侽係偲俁侽侽俆傪偍屳偄偑斀偡傞愙揰曽岦偱俽俤俿乛俼俽俿偝偣丄
俁侽侽俆偺僆儖僞僱僀僩傪妋幚側傕偺偲偟偰偄傑偡丅
弖帪愙揰偼丄僾儘僌儔儉拞偱偼 俢俬俥倀
偲偄偆柦椷偱娙扨偵嶌傟傑偡丅
崁栚偵栠傞丂丂丂丂丂丂丂愭摢偵栠傞丂丂丂丂丂丂丂儂乕儉偵僕儍儞僾
僾儘僌儔儉俀乮僩儔僶乕僗侽俀乯
戣柤丗塣揮乛掆巭愙揰偵傛傞塣揮丅墲暅塣摦偺傒偺娙堈斉丅淖兽敖01偺俽倕們倲倝倧値侽侽俆傪墳梡柦椷偱娙慺壔丅
拲堄帠崁丗幨恀偲恾柺偼丄僾儘僌儔儉侾乮僩儔僶乕僗侽侾乯偲摨偠偱偡丅嶲峫偵偟偰壓偝偄丅丂僾儘僌儔儉侾(淖兽敖01) 傊僕儍儞僾
伀僾儘僌儔儉
伀僾儘僌儔儉偺愢柧
捛婰
俽倕們倲倝倧値侽侽偼丄俹俴俠偵揹尮偑擖偭偨帪偺侾夞偩偗幚峴偝傟傞弶婜愝掕梡偱偡丅
嵟弶偺僩儔僶乕僗偺堏摦曽岦傪巜掕偟偰偄傑偡丅
侾侽侽侽傪俷俶仺俷俥俥偵偰塣揮傪奐巒偟丄侾侽侽侾傪俷俶仺俷俥俥偡傞偲掆巭偟傑偡丅乮帺屓曐帩夞楬乯
侾侽侽侽偲侾侽侽侾偼撪晹愙揰側偺偱丄俹俴俠偺傾僋僙僗僂僀儞僪僂偐傜俷俶乛俷俥俥偝偣傞偐丄
儔僟乕僒億乕僩僜僼僩偺嫮惂俷俶乛俷俥俥婡擻傪巊偆偙偲偵側傝傑偡丅
侾侽侽侽傪侽侽侽侽偵丄侾侽侽侾傪侽侽侽侾偵彂偒姺偊丄
俹俴俠偺侽侽侽侽抂巕偲侽侽侽侾抂巕偵墴偟儃僞儞僗僀僢僠傪晅偗傟偽丄
儃僞儞憖嶌偵曄峏偱偒傑偡丅
僩儔僶乕僗偼俀偮偺嬤愙僗僀僢僠偺娫傪墲暅偡傟偽傛偄偺偱丄
偄偢傟偐偺嬤愙偑俷俶偡傞搙偵丄儌乕僞乕偺夞揮曽岦傪媡偵偡傟偽丄
偄偮偱傕俀偮偺嬤愙偺娫偵偄傞偙偲偵側傝傑偡丅
偦偙偱夞揮曽岦傪帵偡僼儔僌傪梡堄偟丄偙傟傪僆儖僞僱僀僩偡傟偽丄
偙偺婡擻偼幚尰偱偒傑偡丅
仛崱夞偺僾儘僌儔儉偼俽倕們倲倝倧値俆偵偰僆儖僞僱僀僩張棟傪峴偭偰偄傑偡丅
俁侽侽俀偲俁侽侽俁偼嬤愙偑俷俶偟偨帪偺弖帪愙揰偱偡丅
俴俢俙 俁侽侽侽
偼丄侾俇屄偺俁侽侽侽乣俁侽侾俆傑偱偺撪晹曗彆儕儗乕偺俷俶乛俷俥俥忣曬慡偰傪儊儌儕乕偟傑偡丅
俤俷俼俙 亹侽侽俀侽
偼丄儊儌儕乕偝傟偨侾俇屄偺俷俶乛俷俥俥忣曬偺撪丄俇斣栚偺俷俶乛俷俥俥忣曬傪斀揮偟傑偡丅
俽俿俙 俁侽侽侽 偼丄俤俷俼俙
偱曄壔偟偨忣曬傪丄侾俇屄偺俁侽侽侽乣俁侽侾俆傑偱偺撪晹曗彆儕儗乕偵彂偒崬傒傑偡丅
偙傟偱侽偐傜悢偊偰俇斣栚偺撪晹曗彆儕儗乕乮俁侽侽俆乯偺傒偑斀揮乮僆儖僞僱僀僩乯偟偰偄傑偡丅
僾儘僌儔儉侽侾傛傝丄峴悢偼彮側偔側傝丄乮俁侽侽係乯傕巊傢側偄偺偱僾儘僌儔儉岠棪偼椙偄偺偱偡偑丄
峫偊曽偼暋嶨偱偡丅僾儘僌儔儉侽侾幃偑椙偄偐丄僾儘僌儔儉侽俀幃偑椙偄偐偼岲傒偺栤戣偱偟傚偆丅
弖帪愙揰偼丄僾儘僌儔儉拞偱偼 俢俬俥倀
偲偄偆柦椷偱娙扨偵嶌傟傑偡丅
崁栚偵栠傞丂丂丂丂丂丂丂愭摢偵栠傞丂丂丂丂丂丂丂儂乕儉偵僕儍儞僾
僾儘僌儔儉俁乮僩儔僶乕僗侽俁乯
戣柤丗塣揮乛掆巭愙揰偵傛傞塣揮丅塣揮掆巭帪偵掕埵抲偱掆巭丅乮旕嬱摦懁掆巭乯
拲堄帠崁丗幨恀偲恾柺偼丄僾儘僌儔儉侾乮僩儔僶乕僗侽侾乯偲摨偠偱偡丅嶲峫偵偟偰壓偝偄丅丂僾儘僌儔儉侾(淖兽敖01) 傊僕儍儞僾
伀僾儘僌儔儉
伀僾儘僌儔儉偺愢柧
捛婰
俽倕們倲倝倧値侽侽偼丄俹俴俠偵揹尮偑擖偭偨帪偺侾夞偩偗幚峴偝傟傞弶婜愝掕梡偱偡丅
嵟弶偺僩儔僶乕僗偺堏摦曽岦傪巜掕偟偰偄傑偡丅
侾侽侽侽傪俷俶仺俷俥俥偵偰塣揮傪奐巒偟丄侾侽侽侾傪俷俶仺俷俥俥偡傞偲掆巭偟傑偡丅乮帺屓曐帩夞楬乯
侾侽侽侽偲侾侽侽侾偼撪晹愙揰側偺偱丄俹俴俠偺傾僋僙僗僂僀儞僪僂偐傜俷俶乛俷俥俥偝偣傞偐丄
儔僟乕僒億乕僩僜僼僩偺嫮惂俷俶乛俷俥俥婡擻傪巊偆偙偲偵側傝傑偡丅
侾侽侽侽傪侽侽侽侽偵丄侾侽侽侾傪侽侽侽侾偵彂偒姺偊丄
俹俴俠偺侽侽侽侽抂巕偲侽侽侽侾抂巕偵墴偟儃僞儞僗僀僢僠傪晅偗傟偽丄
儃僞儞憖嶌偵曄峏偱偒傑偡丅
僩儔僶乕僗偼俀偮偺嬤愙僗僀僢僠偺娫傪墲暅偡傟偽傛偄偺偱丄
偄偢傟偐偺嬤愙偑俷俶偡傞搙偵丄儌乕僞乕偺夞揮曽岦傪媡偵偡傟偽丄
偄偮偱傕俀偮偺嬤愙偺娫偵偄傞偙偲偵側傝傑偡丅
偦偙偱夞揮曽岦傪帵偡僼儔僌傪梡堄偟丄偙傟傪僆儖僞僱僀僩偡傟偽丄
偙偺婡擻偼幚尰偱偒傑偡丅
仛崱夞偺僾儘僌儔儉偼俽倕們倲倝倧値俀偵偰掆巭忦審傪峫偊偰偄傑偡丅
掆巭愙揰乮侾侽侽侾乯偵偰塣揮巜椷乮俁侽侽俇乯偑俷俥俥偵側偭偰傕丄
塣揮婰壇乮俁侽侽俈乯偼旕嬱摦懁茌籍乮俁侽侽俁乯偑擖傞傑偱丄
帺屓曐帩偝傟偰偄傑偡丅
掆巭愙揰偑擖椡偝傟偨帪丄偦偺帪揰偱掆巭偡傞偺偱偼側偔丄
昁偢旕嬱摦懁偵払偡傞傑偱僩儔僶乕僗偼摦偔偙偲偵側傝傑偡丅
弖帪愙揰(茌籍)偼丄僾儘僌儔儉拞偱偼
俢俬俥倀 偲偄偆柦椷偱娙扨偵嶌傟傑偡丅
崁栚偵栠傞丂丂丂丂丂丂丂愭摢偵栠傞丂丂丂丂丂丂丂儂乕儉偵僕儍儞僾
僾儘僌儔儉係乮僩儔僶乕僗侽係乯
戣柤丗塣揮乛掆巭愙揰偵傛傞塣揮丅塣揮掆巭帪偵掕埵抲偱掆巭丅乮嬱摦懁掆巭乯
拲堄帠崁丗幨恀偲恾柺偼丄僾儘僌儔儉侾乮僩儔僶乕僗侽侾乯偲摨偠偱偡丅嶲峫偵偟偰壓偝偄丅丂僾儘僌儔儉侾(淖兽敖01) 傊僕儍儞僾
伀僾儘僌儔儉
伀僾儘僌儔儉偺愢柧
捛婰
俽倕們倲倝倧値侽侽偼丄俹俴俠偵揹尮偑擖偭偨帪偺侾夞偩偗幚峴偝傟傞弶婜愝掕梡偱偡丅
嵟弶偺僩儔僶乕僗偺堏摦曽岦傪巜掕偟偰偄傑偡丅
侾侽侽侽傪俷俶仺俷俥俥偵偰塣揮傪奐巒偟丄侾侽侽侾傪俷俶仺俷俥俥偡傞偲掆巭偟傑偡丅乮帺屓曐帩夞楬乯
侾侽侽侽偲侾侽侽侾偼撪晹愙揰側偺偱丄俹俴俠偺傾僋僙僗僂僀儞僪僂偐傜俷俶乛俷俥俥偝偣傞偐丄
儔僟乕僒億乕僩僜僼僩偺嫮惂俷俶乛俷俥俥婡擻傪巊偆偙偲偵側傝傑偡丅
侾侽侽侽傪侽侽侽侽偵丄侾侽侽侾傪侽侽侽侾偵彂偒姺偊丄
俹俴俠偺侽侽侽侽抂巕偲侽侽侽侾抂巕偵墴偟儃僞儞僗僀僢僠傪晅偗傟偽丄
儃僞儞憖嶌偵曄峏偱偒傑偡丅
僩儔僶乕僗偼俀偮偺嬤愙僗僀僢僠偺娫傪墲暅偡傟偽傛偄偺偱丄
偄偢傟偐偺嬤愙偑俷俶偡傞搙偵丄儌乕僞乕偺夞揮曽岦傪媡偵偡傟偽丄
偄偮偱傕俀偮偺嬤愙偺娫偵偄傞偙偲偵側傝傑偡丅
偦偙偱夞揮曽岦傪帵偡僼儔僌傪梡堄偟丄偙傟傪僆儖僞僱僀僩偡傟偽丄
偙偺婡擻偼幚尰偱偒傑偡丅
仛崱夞偺僾儘僌儔儉偼俽倕們倲倝倧値俀偵偰掆巭忦審傪峫偊偰偄傑偡丅
掆巭愙揰乮侾侽侽侾乯偵偰塣揮巜椷乮俁侽侽俇乯偑俷俥俥偵側偭偰傕丄
塣揮婰壇乮俁侽侽俈乯偼嬱摦懁茌籍乮俁侽侽俀乯偑擖傞傑偱丄
帺屓曐帩偝傟偰偄傑偡丅
掆巭愙揰偑擖椡偝傟偨帪丄偦偺帪揰偱掆巭偡傞偺偱偼側偔丄
昁偢嬱摦懁偵払偡傞傑偱僩儔僶乕僗偼摦偔偙偲偵側傝傑偡丅
弖帪愙揰(茌籍)偼丄僾儘僌儔儉拞偱偼
俢俬俥倀 偲偄偆柦椷偱娙扨偵嶌傟傑偡丅
崁栚偵栠傞丂丂丂丂丂丂丂愭摢偵栠傞丂丂丂丂丂丂丂儂乕儉偵僕儍儞僾
|
|
仾嬤愙僗僀僢僠偵偼丄僉乕僄儞僗
俤倅亅侾俉俿 傪巊梡丅
伀夞楬恾柺
仾恾柺偺愢柧
丂俲倅亅俀係俙俿偺俹俀係乮俀係倁乯偲俶俀係乮侽倁乯偼丄俹俴俠擖椡晹偲嬤愙僗僀僢僠偺揹尮偲偟偰巊梡偟偰偄傑偡丅
丂嬤愙僗僀僢僠偼屄恖揑側岲傒偱俁慄幃傪巊梡偟偰偄傑偡偑丄俀慄幃偱傕栤戣偁傝傑偣傫丅
丂俧俆僀儞僶乕僞乕偺 (FWD)侾傪俷俶偵偡傞偲儌乕僞乕偼惓揮偟丄(REV)俀傪俷俶偵偡傞偲儌乕僞乕偼媡揮偟傑偡丅
丂偨偩偟丄椉曽偑俷俶偟偨応崌偼丄埨慡偺偨傔掆巭偡傞傛偆偵嶌傜傟偰偄傑偡丅
丂(COM)侾侾偼丄嫟捠僐儌儞抂巕偱偡丅
丂(ERR)俀俇偼僀儞僶乕僞乕傾儔乕儉偺弌椡愙揰偵愝掕偟偰偄傑偡丅乮草兽袄皞虗輶鐷2-03偵傛傞乯
丂壗傜偐偺堎忢偑敪惗偡傞偲丄(ERR)俀俇抂巕偲(COM)俀俈抂巕偲偺娫偑摫捠偟傑偡丅
丂懍搙乮廃攇悢乯愝掕偼丄僨僕僞儖僆儁儗乕僞乕乮僀儞僶乕僞乕昞柺偵憰旛偝傟偰偄傞憖嶌愝掕僷僱儖乯偱愝掕偟傑偡丅
丂僀儞僶乕僞乕偺愝掕抣偼丄僾儘僌儔儉偺愢柧棑偵婰嵹偟偰偄傑偡丅
伀僾儘僌儔儉
伀僾儘僌儔儉偺愢柧
捛婰
俽倕們倲倝倧値侽侽偼丄俹俴俠偵揹尮偑擖偭偨帪偺侾夞偩偗幚峴偝傟傞弶婜愝掕梡偱偡丅
嵟弶偺僩儔僶乕僗偺堏摦曽岦傪巜掕偟偰偄傑偡丅
侾侽侽侽傪俷俶仺俷俥俥偵偰塣揮傪奐巒偟丄侾侽侽侾傪俷俶仺俷俥俥偡傞偲掆巭偟傑偡丅乮帺屓曐帩夞楬乯
侾侽侽侽偲侾侽侽侾偼撪晹愙揰側偺偱丄俹俴俠偺傾僋僙僗僂僀儞僪僂偐傜俷俶乛俷俥俥偝偣傞偐丄
儔僟乕僒億乕僩僜僼僩偺嫮惂俷俶乛俷俥俥婡擻傪巊偆偙偲偵側傝傑偡丅
侾侽侽侽傪侽侽侽侽偵丄侾侽侽侾傪侽侽侽侾偵彂偒姺偊丄
俹俴俠偺侽侽侽侽抂巕偲侽侽侽侾抂巕偵墴偟儃僞儞僗僀僢僠傪晅偗傟偽丄
儃僞儞憖嶌偵曄峏偱偒傑偡丅
僩儔僶乕僗偼俀偮偺嬤愙僗僀僢僠偺娫傪墲暅偡傟偽傛偄偺偱丄
偄偢傟偐偺嬤愙偑俷俶偡傞搙偵丄儌乕僞乕偺夞揮曽岦傪媡偵偡傟偽丄
偄偮偱傕俀偮偺嬤愙偺娫偵偄傞偙偲偵側傝傑偡丅
偦偙偱夞揮曽岦傪帵偡僼儔僌傪梡堄偟丄偙傟傪僆儖僞僱僀僩偡傟偽丄
偙偺婡擻偼幚尰偱偒傑偡丅
仛崱夞偺僾儘僌儔儉偼丄草兽袄氨装褋i侽侽侾侽乯偵偰帺屓曐帩傪愗傝丄嬞媫掆巭偲偟偰偄傑偡丅
俽倕們倲倝倧値俇偵偰尨揰暅婣偺擖椡張棟偑峴傢傟傑偡丅
尨揰暅婣愙揰乮侾侽侽俀乯偵偰尨揰暅婣婰壇乮俁侽侽俉乯偑帺屓曐帩偟丄
嬱摦懁LS乮侽侽侽俉乯傪偨偨偔傑偱曐帩偼懕偒傑偡丅
乮俁侽侽俋乯偼乮俁侽侽俉乯偺俢俬俥倀偱丄嬱摦懁偵岦偐偆傛偆偵乮俁侽侽俆乯傪愝掕偟傑偡丅
偟偨偑偭偰丄尨揰暅婣偑擖椡偝傟傞偲丄嬱摦懁傊堏摦偟丄嬱摦懁LS乮嬤愙讲乯偱掆巭偟傑偡丅
崁栚偵栠傞丂丂丂丂丂丂丂愭摢偵栠傞丂丂丂丂丂丂丂儂乕儉偵僕儍儞僾
|
|
仾嬤愙僗僀僢僠偵偼丄僉乕僄儞僗
俤倅亅侾俉俿 傪巊梡丅
伀夞楬恾柺
仾恾柺偺愢柧
丂俲倅亅俀係俙俿偺俹俀係乮俀係倁乯偲俶俀係乮侽倁乯偼丄俹俴俠擖椡晹偲嬤愙僗僀僢僠偺揹尮偲偟偰巊梡偟偰偄傑偡丅
丂嬤愙僗僀僢僠偼屄恖揑側岲傒偱俁慄幃傪巊梡偟偰偄傑偡偑丄俀慄幃偱傕栤戣偁傝傑偣傫丅
丂俧俆僀儞僶乕僞乕偺 (FWD)侾傪俷俶偵偡傞偲儌乕僞乕偼惓揮偟丄(REV)俀傪俷俶偵偡傞偲儌乕僞乕偼媡揮偟傑偡丅
丂偨偩偟丄椉曽偑俷俶偟偨応崌偼丄埨慡偺偨傔掆巭偡傞傛偆偵嶌傜傟偰偄傑偡丅
丂(COM)侾侾偼丄嫟捠僐儌儞抂巕偱偡丅
丂(High)俆偼懡抜懍巜椷侾偱丄俷俶偵偡傞偲僀儞僶乕僞乕偺愝掕(D1-02)偺廃攇悢傪弌椡偟傑偡丅
丂俷俥俥偺応崌偼丄(D1-01)偵偰愝掕偝傟偨廃攇悢傪弌椡偟傑偡丅
丂懍搙乮廃攇悢乯愝掕偼丄僨僕僞儖僆儁儗乕僞乕乮僀儞僶乕僞乕昞柺偵憰旛偝傟偰偄傞憖嶌愝掕僷僱儖乯偱愝掕偟傑偡丅
丂僀儞僶乕僞乕偺愝掕抣偼丄僾儘僌儔儉偺愢柧棑偵婰嵹偟偰偄傑偡丅
伀僾儘僌儔儉
伀僾儘僌儔儉偺愢柧
捛婰
俽倕們倲倝倧値侽侽偼丄俹俴俠偵揹尮偑擖偭偨帪偺侾夞偩偗幚峴偝傟傞弶婜愝掕梡偱偡丅
嵟弶偺僩儔僶乕僗偺堏摦曽岦傪巜掕偟偰偄傑偡丅
侾侽侽侽傪俷俶仺俷俥俥偵偰塣揮傪奐巒偟丄侾侽侽侾傪俷俶仺俷俥俥偡傞偲掆巭偟傑偡丅乮帺屓曐帩夞楬乯
侾侽侽侽偲侾侽侽侾偼撪晹愙揰側偺偱丄俹俴俠偺傾僋僙僗僂僀儞僪僂偐傜俷俶乛俷俥俥偝偣傞偐丄
儔僟乕僒億乕僩僜僼僩偺嫮惂俷俶乛俷俥俥婡擻傪巊偆偙偲偵側傝傑偡丅
侾侽侽侽傪侽侽侽侽偵丄侾侽侽侾傪侽侽侽侾偵彂偒姺偊丄
俹俴俠偺侽侽侽侽抂巕偲侽侽侽侾抂巕偵墴偟儃僞儞僗僀僢僠傪晅偗傟偽丄
儃僞儞憖嶌偵曄峏偱偒傑偡丅
僩儔僶乕僗偼俀偮偺嬤愙僗僀僢僠偺娫傪墲暅偡傟偽傛偄偺偱丄
偄偢傟偐偺嬤愙偑俷俶偡傞搙偵丄儌乕僞乕偺夞揮曽岦傪媡偵偡傟偽丄
偄偮偱傕俀偮偺嬤愙偺娫偵偄傞偙偲偵側傝傑偡丅
偦偙偱夞揮曽岦傪帵偡僼儔僌傪梡堄偟丄偙傟傪僆儖僞僱僀僩偡傟偽丄
偙偺婡擻偼幚尰偱偒傑偡丅
仛崱夞偺僾儘僌儔儉偼丄俽倕們倲倝倧値俁丆係偺
俿俵俽侾丆俀 仈俆侽乮崅懍僞僀儅乕侾丆俀
愝掕帪娫俆侽倣俽乯偑丄媫懍嬱摦帪娫偵側傝傑偡丅
俽倕們倲倝倧値俇偺
崅懍影霓乮侽俆侽係乯偼丄奺嬤愙僗僀僢僠偺帺屓曐帩愙揰偵偰俷俶偵側傝丄
僞僀儅乕偑俷俶偵側傞偙偲偱俷俥俥偵側傝傑偡丅
偟偨偑偭偰僩儔僶乕僗偑愜傝曉偡帪揰偱俆侽倣俽娫崅懍偱堏摦偟丄偦偺屻偼捠忢偺懍搙偵栠傝傑偡丅
崁栚偵栠傞丂丂丂丂丂丂丂愭摢偵栠傞丂丂丂丂丂丂丂儂乕儉偵僕儍儞僾
栤偄崌傢偣愭
桳尷夛幮儗僢僋惂屼
戝嶃晎娸榓揷巗揷帯暷挰俇俁揷拞憅屔僒
倲倕倢丗侽俈俀係亅係俁亅侽俉係俆
e_mail: my@lec21.com
