
PLC(シーケンサー)情報局
最終更新日2000年8月25日
Last update 8,25,2000

PLC(シーケンサー)情報局
最終更新日2000年8月25日
Last update 8,25,2000
概略 項目にジャンプ ホームにジャンプ
1985年4月~ に PVC被服電線 の
巻取機(コイラー)
用に製作したものを、簡素化しわかりやすく解説します。
当時は安川電機製プリントモーターにてトラバースの往復運動を行っていました。
↓ガイド ↓モーター側(モーターを正転/逆転することで往復)
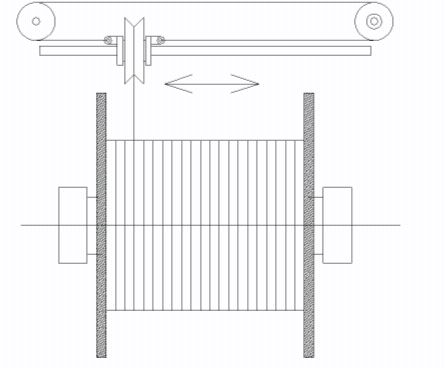
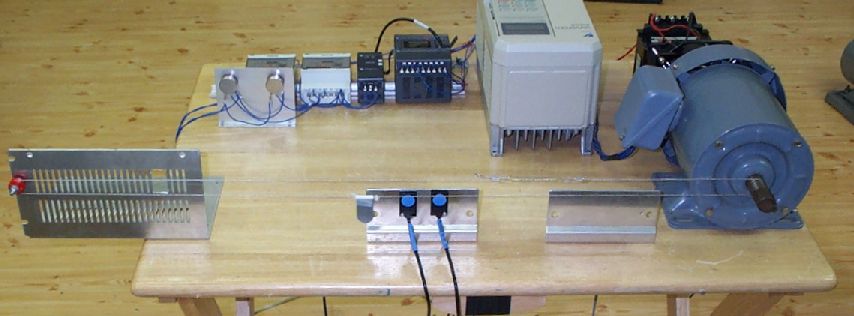
↓下記写真は、評価用に製作したトラバース装置です。(基本構造は上記図と同じです。)
↑プログラム9は、中央に近接スイッチが有り、「真ん中から左右にどのくらい移動」という処理方法です。
また「どのくらい」といった加減は、時間(タイマー)によります。

↑プログラム7、8、10は左右に近接スイッチがあります。(プログラム7、8はエンコーダーを使いません)

↑プログラム10はエンコーダーにて正確に計測し、移動量を制御します。エンコーダーはOMRON製E6C-CWZ5Cを使用。
モーターはインバーターモーターを使い、インバーターにて駆動されます。インバーターは安川電機製616G5(0.75KW)を使用。
↓制御機器全体:左から KV-24AT(PLC本体)、KL-N10V(各KL装置との通信ユニット)、KL-4AD(AD変換ユニット)、KL-2DA(DA変換ユニット)
 VR以外は全てキーエンス製
VR以外は全てキーエンス製
↓プログラム11は液晶タッチパネルによる操作を説明します。タッチパネルには、キーエンス製VT-5SBを使用。(↓)
 |
 |
↓液晶タッチパネルとKV-24AT(PLC本体)との接続は、専用ケーブル(OP26484)で直結できます。

項目
(プログラムNo.は大きくなるほど難しくなります)
プログラム7(トラバース07) トラバース02をVR(ボリューム)で可変速。(KL-4AD、KL-2DA使用編)。<アナログ入出力、数値のクランプ
など>
プログラム8(トラバース08) トラバース02をライン速度(生産速度)で可変速。(KL-4AD、KL-2DA使用編)。<アナログ入出力、数値の扱い方
など>
プログラム9(トラバース09) 2つのVRでトラバース反転位置を決定。(KL-4AD、KL-2DA使用編)。<アナログ入出力、計算結果をタイマーに反映
など>
プログラム10(トラバース10) 2相エンコーダーによる位置決め。(高速カウンター使用編)。<高速カウンター、アナログ入出力、数値の比較
など>
プログラム11(トラバース11) プログラム10を液晶タッチパネルで操作する。(液晶タッチパネル使用編)。<タッチパネル、高速カウンター
など>
先頭に戻る ホームにジャンプ
プログラム7(トラバース07)
題名:運転/停止接点による運転。トラバース02をVR(ボリューム)で可変速。(KL-4AD、KL-2DA使用編)
プログラム02はインバーター側の設定で移動速度を決定していましたが、これをPLCで行う方法を解説します。
KL-4AD(A/D変換ユニット)にVRの信号を入力し、KL-2DA(D/A変換ユニット)からアナログ出力を行います。
アナログ出力(0~10V)で、インバーターの速度を可変します。
↓回路図面
↑図面の説明
KZ-24ATのP24(24V)とN24(0V)は、PLC入力部と近接スイッチの電源として使用しています。
近接スイッチは個人的な好みで3線式を使用していますが、2線式でも問題ありません。
G5インバーターの (FWD)1をONにするとモーターは正転し、(REV)2をONにするとモーターは逆転します。
ただし、両方がONした場合は、安全のため停止するように作られています。
(COM)11は、共通コモン端子です。
速度(周波数)設定は、KL-2DAのV0、C0のアナログ出力によります。
KL-N10VはKV-24AT(PLC本体)とKL-4AD(アナログ入力)、KL-2DA(アナログ出力)との通信を確立するものです。
このKLシリーズは、SA、SB、SGの3線で通信を行う特殊I/O装置です。
インバーターの設定値は、プログラムの説明欄に記載しています。
↓プログラム
↓プログラムの説明
追記
Section00は、PLCに電源が入った時の1回だけ実行される初期設定用です。
KL-4AD、KL-2DAと通信する為の初期設定と、
最初のトラバースの移動方向を指定しています。
Section01は、
1000をON→OFFにて運転を開始し、1001をON→OFFすると停止します。(自己保持回路)
1000と1001は内部接点なので、PLCのアクセスウインドウからON/OFFさせるか、
ラダーサポートソフトの強制ON/OFF機能を使うことになります。
1000を0000に、1001を0001に書き換え、
PLCの0000端子と0001端子に押しボタンスイッチを付ければ、
ボタン操作に変更できます。
トラバースは2つの近接スイッチの間を往復すればよいので、
いずれかの近接がONする度に、モーターの回転方向を逆にすれば、
いつでも2つの近接の間にいることになります。
そこで回転方向を示すフラグを用意し、これをオルタネイトすれば、
この機能は実現できます。(Section5にてオルタネイト処理)
★今回のプログラムはSection6の、1行目で0.1秒毎の瞬時接点を得ています。
これは2行目からの応用命令に配慮しているのです。
応用命令は処理が重たく、今回はVR(ボリューム)入力なので、
常に実行する必要はありません。
そこで DIFU 3010
にて0.1秒毎の瞬時接点を作り、
2行目以降を0.1秒毎に実行するよう制限し、PLCの処理負担に配慮しています。
2行目のLDA
DM1600で、KL-4ADのch0に入力された電圧を数値で読み取り、アキュームレーターにメモリーします。
(KL-4ADは0~10Vの入力で0~4000の数値を発します。ただし上限は10.23V=4095です。)
STA
TM10は、アキュームレーターの数値をテンポラリーメモリー10にコピーさせます。
STA
1100は、アキュームレーターの数値を内部補助リレーの1100~1115にコピーし、最終的には1115の動きを得ています。
KL-4ADから得た数値は0~4095までと、65535~61439までがあり、前者はプラスの数値を、後者はマイナスの数値を表します。
もしch0の入力が0Vだとすると、多少のノイズの影響で、数値は+2~0~-2程度の変動がでます。
しかし今回の目的はVRをch0に入力し、KL-2DAでそれを出力するので、
マイナスの値は本来不必要です。マイナスの値(65535~61439)をSTA
1100すると、
1115がONし、プラスの値(0~4095)をSTA
1100すると1115はOFFします。
これを利用して、
1115がON(マイナスの時)で続く命令文
LDA #0000 STA TM10
を実行します。
「マイナスの時は、TM10を0にする」という処理です。
3行目の LDA TM10 MUL
#200 DIV #1000 STA
DM1700 は、
TM10の値を200倍にしそれを1000分の1にし、DM1700(KL-4DAのch0)にストアします。
TM10はVRのマイナス部分をクランプした値です。これを200分の1000にするのです。
したがってVRは0~10Vの信号を発しch0に入力されているので、
これが0~2V(200分の1000)になってKL-2DAのch0より出力することになります。
インバーターは0~10Vの信号で0~60Hzの速度がでますので、
0~12Hzの速度に制限されることになります。
(KL-2DAの数値の扱いは、KL-4ADと同じです。)
※この乗算(MUL)、除算(DIV)はマイナスの値を考慮して作られていません。
もしマイナスの値をMULしたりDIVしたりするととんでもない値を得てしまい、
外部のインバーターモーターを暴走させる結果になり大変危険です。
こうしたことからもマイナス値を0にクランプする処理は重要と言えます。
※アキュームレーターとは各応用命令間で数値の伝達に使うメモリーです。
※ここでは数値の扱いについて十分な説明をしていませんが、以降で徐々に詳しくなります。
項目に戻る 先頭に戻る ホームにジャンプ
プログラム8(トラバース08)
題名:運転/停止接点による運転。トラバース02をライン速度(生産速度)で可変速。(KL-4AD、KL-2DA使用編)
プログラム02はインバーター側の設定で移動速度を決定していましたが、これをPLCで行う方法を解説します。
KL-4AD(A/D変換ユニット)のch0にライン速度信号を、ch1にはVRの信号を入力し、
ライン速度に同調したトラバース速度を実現します。VRはトラバース速度の微調整用です。
トラバース速度は、KL-2DA(D/A変換ユニット)からアナログ出力にて行います。
↓回路図面
↑図面の説明
KZ-24ATのP24(24V)とN24(0V)は、PLC入力部と近接スイッチの電源として使用しています。
近接スイッチは個人的な好みで3線式を使用していますが、2線式でも問題ありません。
G5インバーターの (FWD)1をONにするとモーターは正転し、(REV)2をONにするとモーターは逆転します。
ただし、両方がONした場合は、安全のため停止するように作られています。
(COM)11は、共通コモン端子です。
速度(周波数)設定は、KL-2DAのV0、C0のアナログ出力によります。
KL-N10VはKV-24AT(PLC本体)とKL-4AD(アナログ入力)、KL-2DA(アナログ出力)との通信を確立するものです。
このKLシリーズは、SA、SB、SGの3線で通信を行う特殊I/O装置です。
インバーターの設定値は、プログラムの説明欄に記載しています。
KL-4ADのV0+端子に接続されたVRはライン速度を、V1+端子のVRは、トラバース速度全体の微調整用です。
↓プログラム
↓プログラムの説明
追記
Section00は、PLCに電源が入った時の1回だけ実行される初期設定用です。
KL-4AD、KL-2DAと通信する為の初期設定と、
最初のトラバースの移動方向を指定しています。
Section01は、
1000をON→OFFにて運転を開始し、1001をON→OFFすると停止します。(自己保持回路)
1000と1001は内部接点なので、PLCのアクセスウインドウからON/OFFさせるか、
ラダーサポートソフトの強制ON/OFF機能を使うことになります。
1000を0000に、1001を0001に書き換え、
PLCの0000端子と0001端子に押しボタンスイッチを付ければ、
ボタン操作に変更できます。
トラバースは2つの近接スイッチの間を往復すればよいので、
いずれかの近接がONする度に、モーターの回転方向を逆にすれば、
いつでも2つの近接の間にいることになります。
そこで回転方向を示すフラグを用意し、これをオルタネイトすれば、
この機能は実現できます。(Section5にてオルタネイト処理)
★今回のプログラムはSection6の、1行目で0.1秒毎の瞬時接点を得ています。
これは2行目からの応用命令に配慮しているのです。(詳細は、プログラム7参照)
2行目のLDA
DM1600で、KL-4ADのch0に入力された電圧を数値で読み取り、アキュームレーターにメモリーします。
STA
TM10は、アキュームレーターの数値をテンポラリーメモリー10にコピーさせます。
STA
1100は、アキュームレーターの数値を内部補助リレーの1100~1115にコピーし、最終的には1115の動きを得ています。
1115はONで値がマイナスである事を識別させ、後に続く命令でTM10を0にクランプします。(詳細は、プログラム7参照)
3行目はch1に対して同様の処理を行います。
4行目の LDA TM10 MUL
TM11 DIV #20480 STA
DM1700 は、
TM10(ch0)の値とTM11(ch1)の値を乗算し、DIVにて20480分の1にし、DM1700(KL-4DAのch0)にストアします。
TM10とTM11はVRのマイナス部分をクランプした値です。各々の値の規定は10V=4000なので、
4000*4000/20480=781
になります。(小数点は切り捨てられ、正数のみの値が得られます)
インバーターは0~10Vの信号で0~60Hzの速度がでます。
したがって
0~781=0~1.95V=0~11.7Hz
に制限されることになります。
※この乗算(MUL)、除算(DIV)はマイナスの値を考慮して作られていません。
もしマイナスの値をMULしたりDIVしたりするととんでもない値を得てしまい、
外部のインバーターモーターを暴走させる結果になり大変危険です。
こうしたことからもマイナス値を0にクランプする処理は重要と言えます。
※アキュームレーターとは各応用命令間で数値の伝達に使うメモリーです。
※ここでは数値の扱いについて十分な説明をしていませんが、以降で徐々に詳しくなります。
項目に戻る 先頭に戻る ホームにジャンプ
プログラム9(トラバース09)
題名:2つのVRでトラバース反転位置を決定。(KL-4AD、KL-2DA使用編)
近接スイッチ2つを中央に配置し、「真ん中から左右にどのくらい移動」という処理を解説します。
KL-4AD(A/D変換ユニット)のch0に非駆動側移動量調整VRを、ch1には駆動側移動量調整VRの信号を入力し、
各VRをタイマーに反映させて、時間にてトラバースを反転させます。
トラバース速度は、KL-2DA(D/A変換ユニット)からアナログ出力にて行います。
↓回路図面
↑図面の説明
KZ-24ATのP24(24V)とN24(0V)は、PLC入力部と近接スイッチの電源として使用しています。
近接スイッチは個人的な好みで3線式を使用していますが、2線式でも問題ありません。
G5インバーターの (FWD)1をONにするとモーターは正転し、(REV)2をONにするとモーターは逆転します。
ただし、両方がONした場合は、安全のため停止するように作られています。
(COM)11は、共通コモン端子です。
速度(周波数)設定は、KL-2DAのV0、C0のアナログ出力によります。
KL-N10VはKV-24AT(PLC本体)とKL-4AD(アナログ入力)、KL-2DA(アナログ出力)との通信を確立するものです。
このKLシリーズは、SA、SB、SGの3線で通信を行う特殊I/O装置です。
インバーターの設定値は、プログラムの説明欄に記載しています。
KL-4ADのV0+端子に接続されたVRは非駆動側移動量調整を、V1+端子のVRは、駆動側移動量調整用です。
↓プログラム
↓プログラムの説明
追記
Section00は、PLCに電源が入った時の1回だけ実行される初期設定用です。
KL-4AD、KL-2DAと通信する為の初期設定と、
最初のトラバースの移動方向を指定しています。
★今回のプログラムはSection3にて、移動方向を自己保持回路で実現しています。
Section4はタイマーにて移動方向を切り替えています。
TMS命令は、最小1m秒の高速タイマーです。
Section5は、1行目で0.1秒毎の瞬時接点を得ています。
これは2行目からの応用命令に配慮しているのです。(詳細は、プログラム7参照)
2行目と4行目の処理はプログラム7を参考にして下さい。
3行目の LDA TM10 MUL
#500 DIV #1000 ADD
#400 STA T002 は、
TM10(ch0)の値を500倍にし、DIVにて1000分の1にし、ADDにて400を加算します。
そしてT002(タイマー)にストアします。この場合、タイマーの設定値を更新したことになります。
TM10はVRのマイナス部分をクランプした値です。各々の値の規定された上限は4000なので、
4000*500/1000+400=2400
になります。(数値は、正数しか処理できません。小数点は切り捨てられます。)
T002は高速タイマーなので、最大2400m秒に設定されます。
(命令語 STA T002
は、キーエンス独自の命令形態です。
基本命令は各社違いが少ないのですが、応用命令は大きく異なる場合があります。)
もしVRが0の時、
タイマーの設定値を0にしてしまったのでは、モーターは激しいチャタリング動作になってしまいます。
これを防止する意味で、ADD
#400にて、VRが0であっても最低400m秒を維持するように考慮しています。
5行目はTM11に対して同様の処理を行います。
6行目の、 LDA #200 STA
DM1700 は、
まずKL-2DAの数値と電圧の関係が、0~4000=0~10V(最大4095なので10.23Vが上限)である事を考慮しなければなりません。
したがって、
200/4000*10V=0.5V
がD/A出力になり、
インバーターは0~10Vの信号で0~60Hzの速度がでるので、
0.5/10*60=3Hz になります。
項目に戻る 先頭に戻る ホームにジャンプ
プログラム10(トラバース10)
題名:2相エンコーダーによる位置決め。(高速カウンター、KL-4AD、KL-2DA使用編)
近接スイッチ2つを左右に配置し、
駆動側近接スイッチ、非駆動側近接スイッチは、オーバーラン用として使用します。
また、駆動側近接スイッチは原点(高速カウンター0位置)としても使用し、
電源投入直後の運転は、一回だけ原点へ移動した後に、
高速カウンターをリセットしてから通常のCMPによる位置決め運転を行います。
データメモリのDM101(非駆動側反転位置)と、DM103(駆動側反転位置)に、
KV-24ATのアクセスウインドウから直接数値を入れて使用します。
例えば、DM101を#4000にし、DM103を#0300にすると、
4000~300の間を往復します。駆動側近接スイッチは原点なので#0000位置です。
DM101の値が、非駆動側近接スイッチに達しないように設定します。
また、 DM101>DM103
でなければなりません。
トラバース速度は、KL-2DA(D/A変換ユニット)からアナログ出力にて行います。
↓回路図面
↑図面の説明
KZ-24ATのP24(24V)とN24(0V)は、PLC入力部と近接スイッチの電源として使用しています。
近接スイッチは個人的な好みで3線式を使用していますが、2線式でも問題ありません。
G5インバーターの (FWD)1をONにするとモーターは正転し、(REV)2をONにするとモーターは逆転します。
ただし、両方がONした場合は、安全のため停止するように作られています。
(COM)11は、共通コモン端子です。
速度(周波数)設定は、KL-2DAのV0、C0のアナログ出力によります。
KL-N10VはKV-24AT(PLC本体)とKL-4AD(アナログ入力)、KL-2DA(アナログ出力)との通信を確立するものです。
このKLシリーズは、SA、SB、SGの3線で通信を行う特殊I/O装置です。
インバーターの設定値は、プログラムの説明欄に記載しています。
KVシリーズは2相エンコーダー用の高速カウンターを2回路内蔵しています。
エンコーダーからの位相差パルスは上図のように直結できます。
KL-4ADのV0+端子に接続されたVRはライン速度を、V1+端子のVRは、トラバース速度全体の微調整用です。
(この部分は、トラバース8と同じです。)
↓プログラム
↓プログラムの説明
追記
Section00は、PLCに電源が入った時の1回だけ実行される初期設定用です。
KL-4AD、KL-2DAと通信する為の初期設定と、高速カウンターの初期設定および、
最初のトラバースの移動方向を指定しています。
Section005は、プログラム8を参考にして下さい。
★今回のプログラムはSection004がメインです。
2相エンコーダーからの位相差パルスは、
CTH0 でカウントされています。
0004入力はA相、0006入力はB相で、アップダウンカウンターになっています。
Section000の
HSP命令は、入力時定数を10uS(マイクロ秒)に高速化し、
最大30KHzまでのパルスをカウント可能にします。
Section004の1行目は、 LDA
CTH0 で高速カウンターの現在値を取得し、
CMP DM101 で、現在値とDM101を比較します。
すると、内部補助リレー(2009、2010、2011)が比較結果で変化します。
2009は、CTH0現在値がDM101より小さい時にONし、2010は等しい時に、
2011は
CTH0現在値がDM101より大きい時にONします。
非駆動側に移動していくと、現在値はどんどん大きくなり、DM101を超えた時
2011 はONになり、3005をリセットします。
すると、今度は駆動側に移動が始まり、現在値は小さくなっていきます。
2行目は、現在値がDM103以下になるのを受けて2009をONにし、3005をセットします。
こうしてDM101~DM103の間をトラバースは往復することになります。
項目に戻る 先頭に戻る ホームにジャンプ
 |
 |
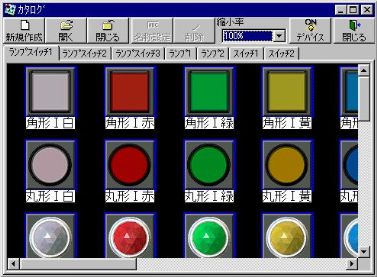
作画ソフトには、カタログ(部品集)が登録されていますので、これを用いて下記(↓)のように配置します。
 |
 |
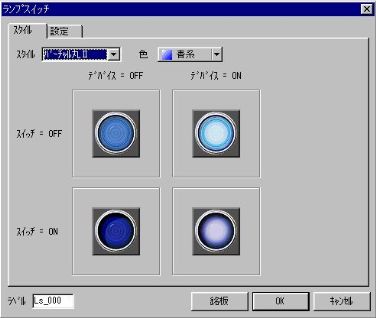
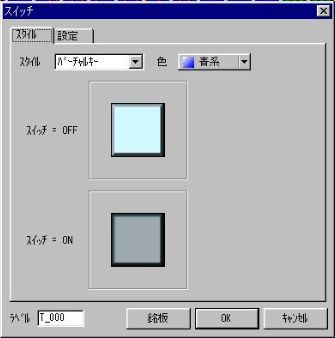
運転ボタンをダブルクリックすると、下記(↓)のダイアログボックスが開きますので同じように入力します。
 |
 |
↑停止ボタンの場合は、色を赤系で、スイッチビットデバイスを1001、ランプビットデバイスを1003にします。
駆動側Setボタンは、スイッチビットデバイスを1200、ランプビットデバイスを1201にし、
非駆動側Setボタンは、スイッチビットデバイスを1202、ランプビットデバイスを1203にします。
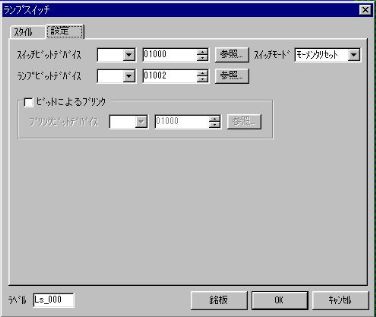
デジスイッチは、下記(↓)のように設定します。
 |
 |
↑これは1の桁の[+]ですが、10の桁以降も「桁数」に注意し、[-]の場合は、デジ減算にします。
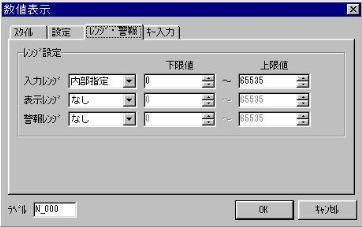
↓デジスイッチ内の数値表示部の設定は、下記のようにします。レンジ・警報の設定は、現在位置表示と同じです。(下記参照)
 |
↓現在位置表示の設定は下記のようにします。
 |
 |
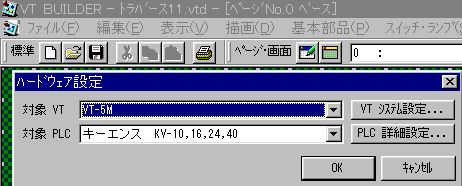
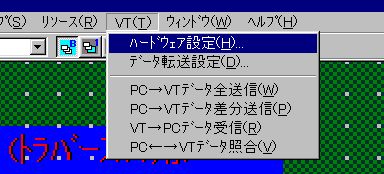
↓続いて、ハードウエア設定を開きます。
 |
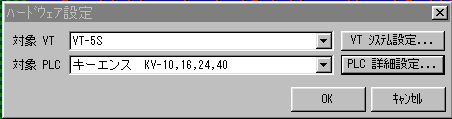 |
↓通信条件、システムメモリエリア、アラーム、リアルタイムトレンドグラフ、その他、を設定します。
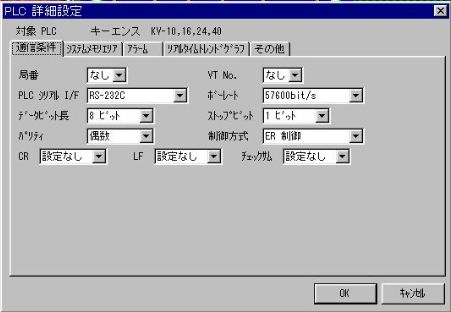 |
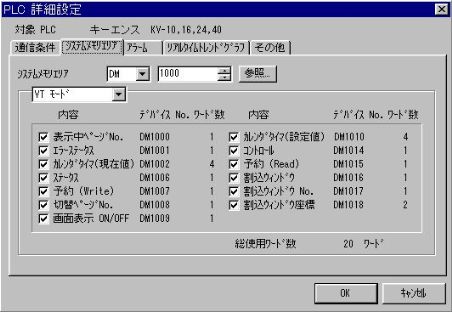 |
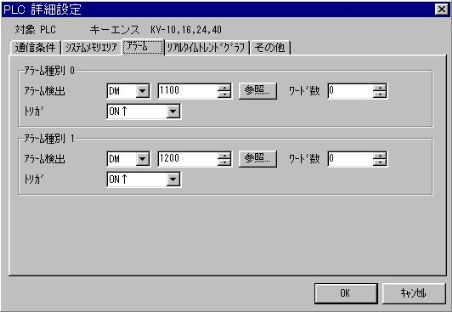 |
 |
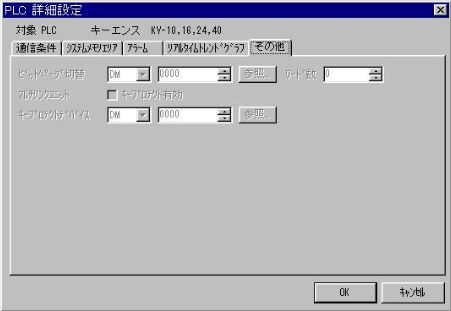 |
↓最後にデータ通信設定を行って終わりです。通信ポートはCOM1~4まで選択できますので、パソコンのCOM番号を設定入力します。
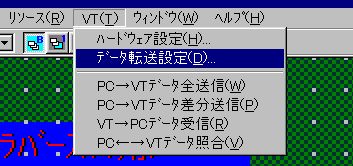 |
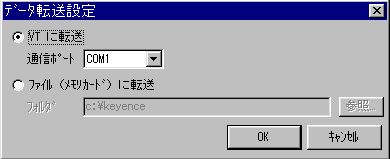 |
あとは、液晶タッチパネルに電源を入れ、
パソコンCOMコネクタが9ピンの場合は、パソコン→VT転送ケーブル(OP26487+OP26486)を、
パソコンCOMコネクタが25ピンの場合は、パソコン→VT転送ケーブル(OP26487+OP26485)を、
接続して、PC→VTデータ全送信(W)を実行し、作画データを液晶に書き込みます。
これだけで、特別なプログラムを作成することなく、PLCとの通信ができてしまいます。
↓回路図面( VT-5SB
が増えました。その他は、図面5と同じです。)
↑図面の説明
液晶タッチパネル(VT-5SB)とKVシリーズとの接続は、専用ケーブル(OP26484)で直結できます。
(その他は、トラバース10の図面5と同じです。)
↓プログラム( Section006
が増えました。その他は、トラバース10と同じです。)
↓プログラムの説明
追記
Section00は、PLCに電源が入った時の1回だけ実行される初期設定用です。
KL-4AD、KL-2DAと通信する為の初期設定と、高速カウンターの初期設定および、
最初のトラバースの移動方向を指定しています。
今までのプログラムは、内部接点である、運転(1000)と停止(1001)は、
PLCのアクセスウインドウからON/OFFさせるか、
ラダーサポートソフトの強制ON/OFF機能に依存してきました。
しかし今回は、
液晶タッチパネル側の、運転ボタンと停止ボタンを、それぞれ1000と1001に定義してあるので、
PLC側のプログラムを変えることなく、機能を継承できています。
★今回のプログラムはSection006がメインの液晶タッチパネルコントロール部分です。
その他は、トラバース10を参考にして下さい。
Section006の、1~2行目は、非駆動側の設定処理です。
1行目 LDA DM100 CMP
DM101 は、DM100(VT非駆動側設定)とDM101(非駆動側反転位置)を比較しています。
その後の B接点(2010)
は、DM100とDM101が等しくない時に、
OUT(1201) をONにします。
DM100は液晶タッチパネルのデジスイッチ操作にてダイレクトに変化します。
したがって OUT(1201)
がONになるという事は、デジスイッチの操作があった場合に限られます。
また、 OUT(1201)
は液晶タッチパネル側ではSetボタンのランプ表示に割り当てられていますので、
デジスイッチを操作変更すると、Setボタンが光り、Setボタンを押す事をうながします。
2行目の、 A接点(1200)
は、液晶タッチパネルのSetボタンに対応しています。
Setボタンを押すとONになり、 LDA
DM100 STA
DM101 が処理されます。
これは、DM100の内容をDM101にコピーし、お互いの内容を等しくします。
(このことにより、Setボタンのランプは消灯します。)
Section006の、3~4行目は、駆動側の設定処理で、しくみは全く同じです。
Section006の5行目、
A接点(3010) LDA CTH0 STA
DM000 は、
0.1秒毎に、CTH0(高速カウンター0)の内容をDM000(液晶側の現在位置表示)にコピーしています。
これでリアルタイムに変化する現在位置表示が実現できます。
0.1秒毎にした理由は、人が目視で確認する部分なので、サイクルタイム毎(数ミリ秒毎)に更新しても、
PLCの処理負担が増えるだけなので、この点に配慮しているのです。
6~7行目は、液晶側の運転/停止ランプの処理で、
1002と1003をPLC内の条件でON/OFFしているだけです。
1002をONにすると、液晶側の運転ボタンが、1003をONにすると、停止ボタンが点灯します。
キーエンスの液晶タッチパネルは、
このように、タッチパネル側で定義した、ボタンやランプ、数値情報などは、
意識することなく、PLC側に反映しています。
項目に戻る 先頭に戻る ホームにジャンプ
問い合わせ先
有限会社レック制御
大阪府岸和田市田治米町63田中倉庫サ
tel:0724-43-0845
e_mail: my@lec21.com